首页
产品中心
检测案例
新闻中心
关于星益沅
联系我们
17751153703 吴小姐
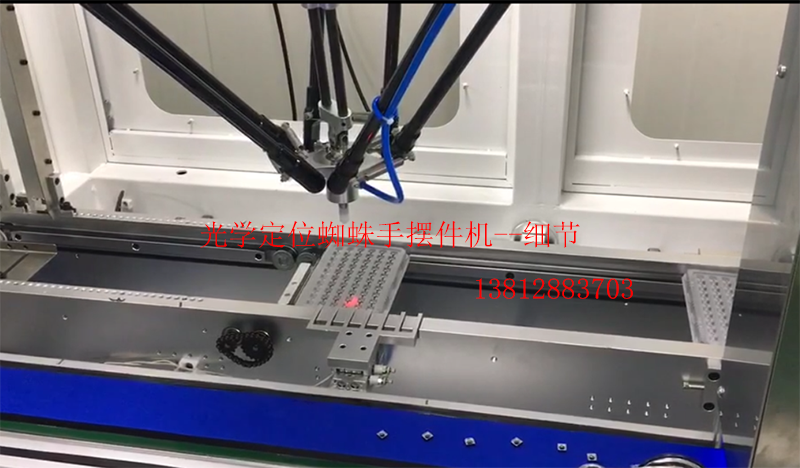
光学平台上配置六轴机器人以及视觉定位系统,平台上放置着任意布置的被夹取物,保证被夹取物放置在机器人和视觉系统工作范围内,以便视觉定位后机械手进行吸取;
进行手眼标定,得到摄像机图像坐标与机械手基座之间的转换关系;
通过视觉匹配算法,从图像中定位出平台上待夹取物位置;
基于手眼标定的结果,定位出被测物体相对于机械手基座的位置,并以固有的通信方式告知机械手被测物体位置信息;